





Premier moteur de persévérance Autonav : La persévérance dépend des caméras de navigation gauche et droite. Le rendu montré ici combine la perspective de deux caméras mobiles lors du premier trajet du rover à l’aide d’AutoNav, la fonction de navigation automatique. Crédit : NASA/JPL-Caltech
Le dernier rover de l’agence navigue autour de Mars à l’aide d’un système de navigation automatique récemment amélioré.
Le plus récent robot à six roues de la NASA sur Mars, la sonde de persévérance, entame un voyage épique à travers le fond du cratère à la recherche de signes de vie ancienne. Cela signifie que l’équipe du rover est profondément impliquée dans la planification des itinéraires de navigation, la création d’instructions à diffuser et même le port de lunettes 3D spéciales pour aider à déterminer leur itinéraire.
Mais de plus en plus, le rover se chargera de se conduire lui-même, grâce à un puissant système de navigation automatisé. Appelé AutoNav, ce système amélioré cartographie en 3D le terrain devant vous, identifie les dangers et trace un itinéraire autour de tous les obstacles sans guidage supplémentaire des contrôleurs au sol.
« Nous avons une capacité appelée » penser en conduisant « », a déclaré Vandy Verma, ingénieur en chef, planificateur de rover et conducteur au Jet Propulsion Laboratory de la NASA en Californie du Sud. « Le rover pense à l’auto-conduite lorsque ses roues patinent. »
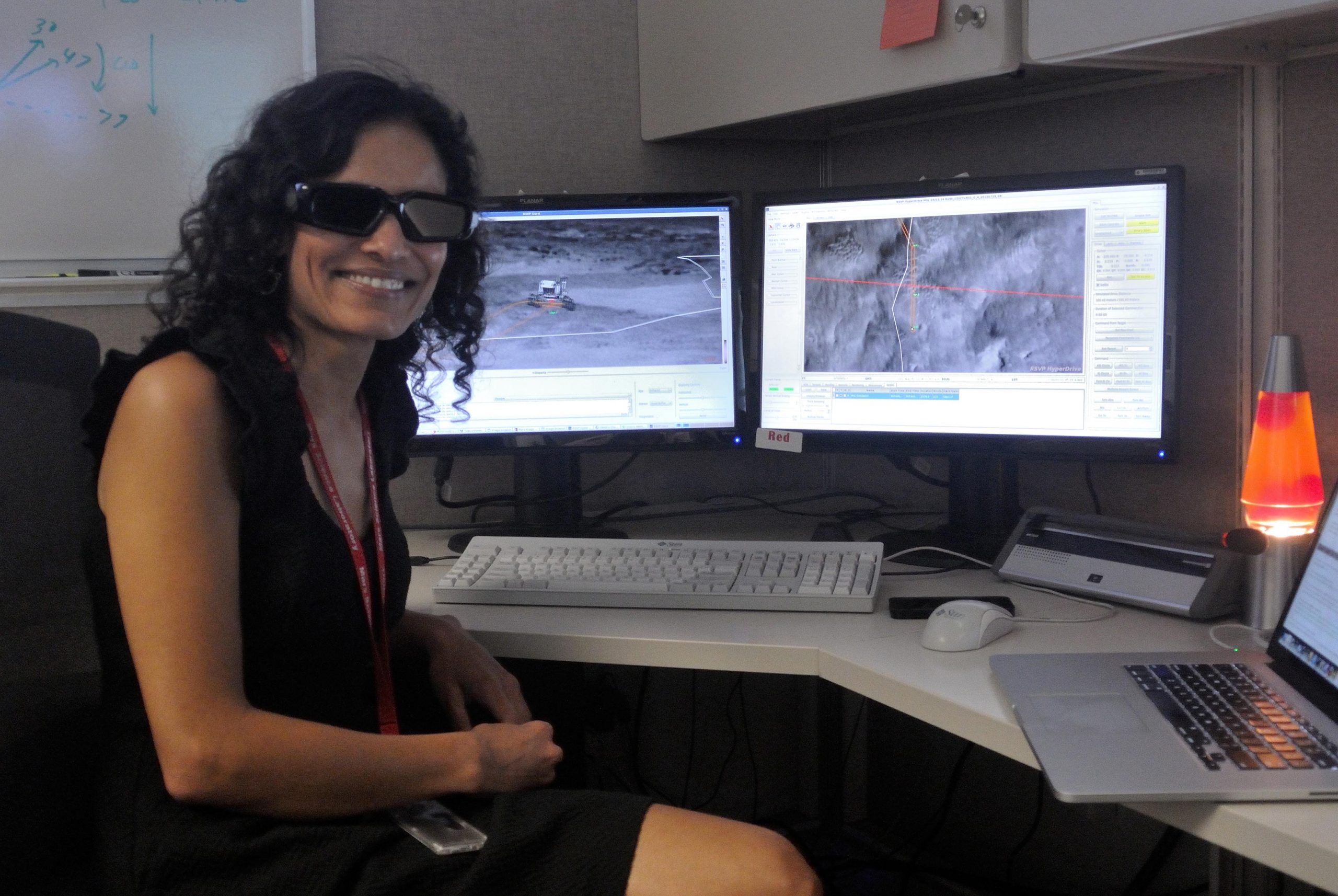
Lunettes 3D utilisées pour conduire Rover : Vandi Verma, un ingénieur qui travaille maintenant avec le rover Mars de la NASA, sert de pilote pour le rover Curiosity. Les conducteurs de rover utilisent toujours les lunettes 3D spéciales que vous portez pour détecter facilement les changements de terrain que le rover pourrait devoir éviter. Source : NASA / JPL-Caltech
Cette capacité, ainsi que d’autres améliorations, peut permettre à Tenacity d’atteindre une vitesse maximale de 393 pieds (120 mètres) par heure ; Son prédécesseur, Curiosity, équipé d’une version antérieure d’AutoNav, couvre environ 66 pieds (20 mètres) par heure alors qu’il gravit le mont Sharp au sud-est.
« Nous avons accéléré AutoNav quatre ou cinq fois », a déclaré Michael McHenry, responsable de la mobilité et membre de l’équipe de planificateurs itinérants du Jet Propulsion Laboratory. « Nous allons beaucoup plus loin en beaucoup moins de temps que Curiosity ne l’a montré. »
Alors que Perseverance entame sa première campagne scientifique sur le terrain du cratère Jezero, AutoNav sera une fonctionnalité clé pour aider à faire le travail.
Ce cratère était un lac, quand, il y a des milliards d’années, Mars était plus humide qu’elle ne l’est aujourd’hui, et la destination de la persistance était un delta de rivière asséché au bord du cratère. Si la vie s’était installée sur Mars très tôt, des signes de sa présence auraient pu y être trouvés. Le rover collectera des échantillons à 9 miles (15 kilomètres), puis préparera les échantillons pour la collecte lors d’une future mission qui les ramènera sur Terre pour analyse.
« Nous allons pouvoir arriver là où les scientifiques veulent aller beaucoup plus rapidement », a déclaré Jennifer Trosper, qui a travaillé sur chacun des rovers martiens de la NASA et est la chef de projet du rover Mars 2020 Perseverance. « Maintenant, nous sommes capables de traverser ce terrain plus complexe au lieu de le contourner : ce n’est pas quelque chose que nous avons pu faire auparavant. »
L’élément humain
Bien sûr, la persistance ne peut pas avoir AutoNav seul. L’implication de l’équipe Rover reste essentielle à la planification et à la direction du chemin de la persévérance. Toute une équipe de professionnels élabore un itinéraire de navigation et planifie une activité de rover, qu’il s’agisse d’examiner une caractéristique géologique intéressante en route vers sa destination ou, bientôt, d’effectuer un échantillonnage.
Simulation informatique du premier Autonav Perseverance Engine : Cette simulation informatique montre le vaisseau spatial Persevering Mars de la NASA alors qu’il effectue sa première commande à l’aide de la fonction de navigation automatique, qui lui permet d’éviter les rochers et autres dangers sans l’intervention d’ingénieurs au sol. Crédit : NASA/JPL-Caltech
En raison du retard du signal radio entre la Terre et Mars, ils ne peuvent tout simplement pas faire avancer le rover à l’aide du joystick. Au lieu de cela, ils scannent des images satellites, portant parfois ces lunettes 3D pour voir la surface de Mars à proximité du rover. Une fois que l’équipe s’arrête, elle envoie les instructions sur Mars et le rover exécute ces instructions le lendemain.
Les roues de persévérance ont également été modifiées pour aider à la rapidité avec laquelle ces plans peuvent être exécutés : en plus d’être légèrement plus gros et plus étroits que les roues de Curiosity, chacune a 48 segments qui ressemblent à des lignes légèrement ondulées, contrairement au tacle à 24 chevrons de Curiosity. Les objectifs étaient d’aider à la traction ainsi qu’à la durabilité.
Curiosity ne pouvait pas AutoNav à cause du problème d’usure des roues », a déclaré Trosper. « Au début de la mission, nous avons rencontré de petits rochers pointus et pointus qui ont commencé à percer des trous dans les roues, et AutoNav n’a pas évité cela. »
Le dégagement ventral plus élevé de la persistance permet également au rover de rouler en toute sécurité sur des terrains plus accidentés, y compris des rochers de bonne taille. Les capacités d’autonavigation améliorées de Perseverance incluent ENav, ou navigation améliorée, une combinaison d’algorithme et de logiciel qui permet une détection plus précise des risques.
Contrairement à ses prédécesseurs, Persévérance ne peut utiliser qu’un de ses ordinateurs pour naviguer à la surface ; L’ordinateur principal peut se consacrer à de nombreuses autres tâches qui maintiennent le véhicule en bonne santé et actif.
Cet élément de calcul de vision, ou VCE, a guidé la persévérance à la surface de Mars lors de son entrée, de sa descente et de sa descente en février. Maintenant, il est utilisé à plein temps pour cartographier le voyage du rover tout en l’aidant à éviter les problèmes en cours de route.
Le rover suit également la distance à laquelle il se déplace d’un endroit à un autre à l’aide d’un système appelé « odomètres optiques ». Persévérance prend périodiquement des photos au fur et à mesure qu’il se déplace et compare une position à l’autre pour voir si elle a parcouru la distance attendue.
Les membres de l’équipe disent qu’ils cherchent à laisser AutoNav « prendre les devants ». Mais ils seront également prêts à intervenir en cas de besoin.
Et qu’est-ce que ça fait de conduire sur Mars ? Les planificateurs et les conducteurs disent qu’il ne vieillit jamais.
« Jesero est incroyable », a déclaré Verma. « C’est le paradis des conducteurs de Rover. Lorsque vous portez des lunettes 3D, vous voyez plus d’ondulations sur le terrain. Certains jours, je ne fais que regarder des images. »
More Stories
Quelle est la prochaine grande nouveauté en matière de perte de poids ?
Une nouvelle découverte pourrait réécrire les livres sur la génétique
Compenser le sommeil le week-end pourrait réduire d’un cinquième le risque de maladie cardiaque – étude | Maladie cardiaque